
Создание человекоподобного робота, который столь же ловок и быстр как взрослый человек—это огромный вызов и прорыв в области робототехники. Поэтому исследователи Массачусетского технологического института всеми способами стремились к этому. Сейчас они трудятся над разработкой робота, который, имитирует движения человека-оператора так же ловко и, с такой же скоростью и балансом.
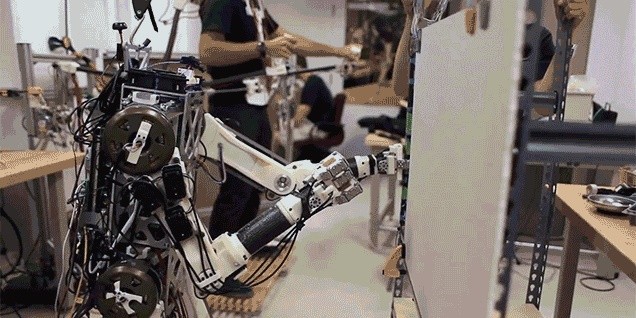
Робот может использоваться в военных целях, управляться человеком с безопасного и удаленного расстояния. РобоБот может идти туда, куда люди идти не могут, (внутрь ядерного реактора), а также выполнять ремонтные и аварийно-спасательных работы в средах, которые являются смертельными для человека.
В данном случае, костюм человека оператора имеет дополнительную функцию обратной связи. Если оператор чувствует, что робот отклонился из-за неровности на рельефе. Он может быстро наклонить его в противоположную сторону, поэтому робот не упадет.










