 Во всем мире становится все больше автоматизированных процессов. Автоматизация характеризуется двумя составляющими. Использование роботизированных устройств увеличивается, и в то же время, эти устройства становятся дешевле. Второй составляющей является то, что роботы освобождают человека от тяжелого труда и дают больше времени на творчество.
Во всем мире становится все больше автоматизированных процессов. Автоматизация характеризуется двумя составляющими. Использование роботизированных устройств увеличивается, и в то же время, эти устройства становятся дешевле. Второй составляющей является то, что роботы освобождают человека от тяжелого труда и дают больше времени на творчество.
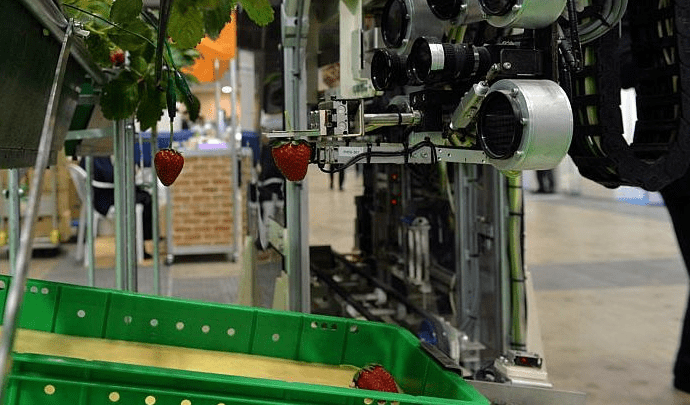
Роботы уже используются в тех сферах, где раньше о них даже не могли думать. Сегодня, в порядке вещей использование роботов в медицине, станкостроении и автомобилестроении.
В мире нет точной статистики использования роботов на производстве и в быту . Уровни роботизации в разных странах различны. Например, в США на 22 тысячи американских компаний приходится 230 тысяч роботов. После кризиса 2008 года, число роботов, занятых на производстве возросло на 17%.
В Японии сейчас на каждых 10 рабочих приходится 0,3 робота, а в Китае только около 0,02. В Южной Корее 0,35 роботов на 10 рабочих. Эта страна лидер на востоке по уровню роботизации. Однако, сегодня Китай показывает сумасшедший спрос на роботизированную технику(рост 25% ежегодно) Автоматизация процессов производства стимулируется правительством Китая.
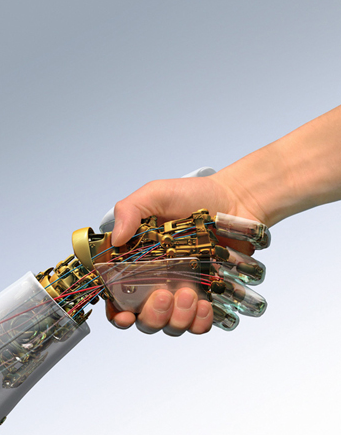
В жизни человека всегда найдется место роботу!
Почему?
1. Экономические показатели. Стоимость роботов постоянно снижается. Они становятся более функциональны. Стоимость труда человека постоянно растет. Для руководителей предприятий это стало основным критерием внедрения роботов на производстве. Издержки производства снижаются, экономические показатели растут.
2. Социальный момент. Молодежь не хочет идти на тяжелую и монотонную работу. Возникает нехватка рабочей силы. Поэтому недостаток персонала можно заменить роботами.
3. Демографический фактор. Человек может перемещаться с одного места на другое, переезжать из одной страны в другую. Во многих странах происходит не только «утечка мозгов», но и рабочей силы. Как следствие – многие правительства стран ищут возможности заменить ручной труд людей, на труд роботов.
Согласно прогнозам к 2030 году машины научаться себя сами перепрограммировать и выполнять любые действия и команды.