Успешное приземление аппарата Филэ на комету 67P/Чурюмова-Герасименко в ноябре этого года стало невероятным достижением. Благополучная операция по стыковке теперь наглядно демонстрирует, что, несмотря на огромные сложности, это возможно. Миссия аппарата Филэ стала в каком-то смысле доказательством концепции приземления на кометы.
Безусловно, между доказательством концепции и ее коммерческим применением длительный период напряженной работы. Поэтому полагать, что успешное приземление аппарата Филэ означает начало разработки месторождений в космосе (на астероидах, кометах или других планетах) в ближайшем будущем будет неверным. Однако бесспорным остается тот факт, что подобные исследования космоса дают человечеству огромные возможности – ресурсы на Земле ограничены и все убывают. Все это ведет к неизбежности освоения ресурсов в нашей галактике. Разработки космических месторождений предполагают вложение астрономических сумм, подобные проекты останутся под силу только наибогатейшим корпорациям, или даже самым состоятельным странам.
Вероятно, лучшим и более реалистичным решением станут совместные мультинациональные предприятия. Разведка и эксплуатация ресурсов солнечной системы должна вестись сообща, чтобы этот процесс приносил пользу всему человечеству, а не только богатой прослойке элиты.
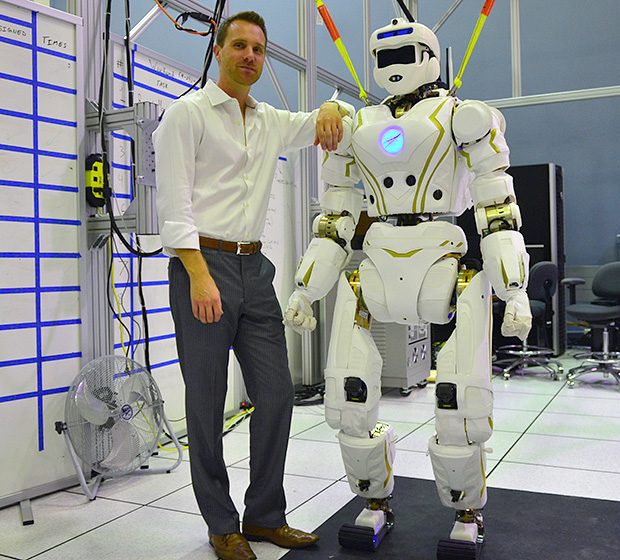
И все же, даже оставив политику в стороне, остаются гигантские технические сложности. Подобные операции невозможно удаленно контролировать с Земли, поэтому приборы должны быть максимально автономными. Как продемонстрировал аппарат Филэ, нам действительно требуются автономные системы, способные справляться с неизвестными и непредсказуемыми ситуациями, адаптироваться под меняющиеся условия и осуществлять перепланирование, если возникнет необходимость.