
В сфере робототехники, также как и в машиностроении, вся работа являет собой серию компромиссов. К примеру, роботы из твердых материалов, более крепкие, однако более быстрые. В то время, как роботы, изготовленные из мягких материалов, являются более гибкими, но перемещаются сравнительно медленно, особенно при выполнении заданий без дополнительных источников питания.
В природе мы видим сочетание мягких и твердых структур, у животных, к примеру. В попытке имитировать это – инженеры из Университета Гарварда и Университета Калифорнии использовали 3-D печать и создали прыгающего робота с жестким негнущимся центром и мягким эластичным внешним материалом.
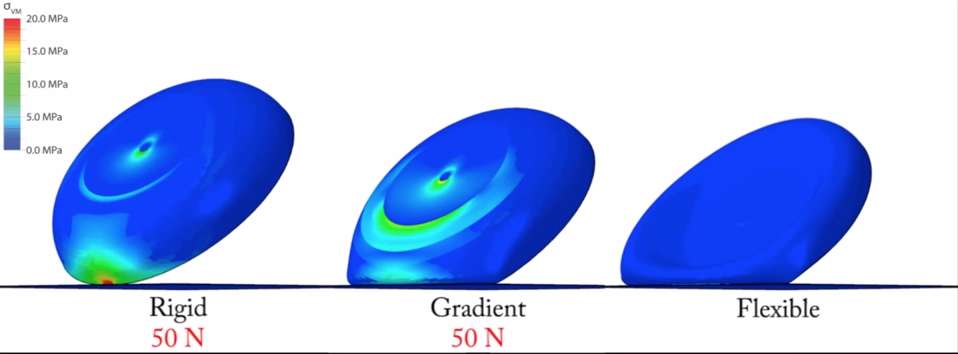
Конструкция состоит из двух вложенных полусфер вокруг жёсткого центра, который держит миниатюрный воздушный компрессор, заполненный бутаном топливный элемент и другие части. Верхняя полусфера напечатана в единственном экземпляре и обладает 9 слоями разной жесткости. Таким образом, в центре она негнущаяся, а по краям прорезиненная.
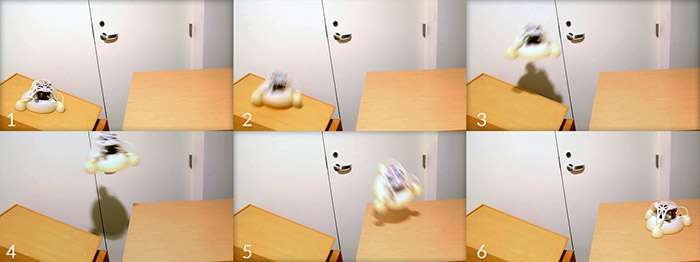
Под полусферой находится «гибкая» часть робота, в которой кислород смешивается с бутаном и воспламеняется. В результате этого сектор надувается, и робот может совершать прыжки.



