Бродить по магазинам Ikea и размышлять какую мебель выбрать и купить может быть на самом деле забавно. Все изменяется на следующем этапе и может превратиться в кошмар.
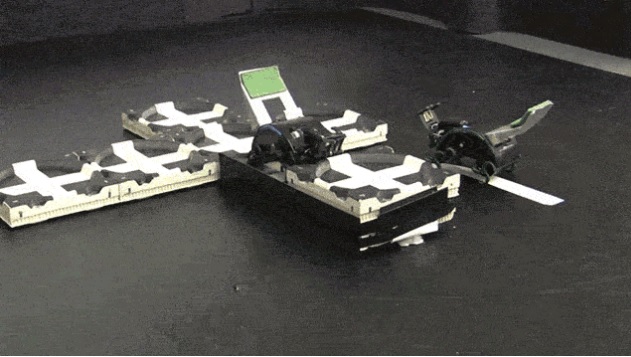
Однако исследователи работают над более эффективным подходом. Вместо того чтобы вы, как покупатели, принимали решение по какому-то конкретному предмету мебели, они предлагают нечто другое. Исследователи разрабатывают крошечных модульных роботов, которые просто собираются в ту мебель, которая вам в данный момент необходима. Скажем в стол, стул, скамейку, или любой другой предмет.
Этот научно-исследовательский проект, кажется, направлен на людей с инвалидностью. Это было бы очень практично и полезно иметь, к примеру, такой стул, который автоматически собирается и поворачивается к человеку в случае необходимости. Но в этом изобретении есть также большой потенциал для всех остальных.
При еще большем уменьшении размеров, модульные роботы смогут также воссоздавать конкретные проекты и воспроизводить дизайн мебели. Представьте – однажды, вместо покупок по каталогу или хождению по магазинам в поисках кухонного стола, можно будет просто скачать инструкции. И тогда небольшая группа роботов автоматически соберет у вас дома новенький столик Torsby в вашу столовую.