Изучение скоординированного движения насекомых является основной темой в лаборатории Bionic Learning Network компании Festo. Разработчики направляют их знания, полученные в проектах BionicOpter и eMotionSpheres на создание бионических бабочек и муравьев. Эти устройства сочетают в себе сверхлегкую структуру искусственных насекомых с согласованным поведением движения в коллективе!
Скоординированный полет с GPS и инфракрасными камерами
Десять камер, установленных в помещении для испытания роботов-бабочек, используют инфракрасные маркеры. Камеры передают данные о местоположении на центральный компьютер, который координирует бабочек извне. Система интеллектуальных сетей создает руководство и мониторинг, и может быть использована в сетевой фабрике в будущем.
Высоко интегрированные научно-исследовательские платформы с минимальным использованием материалов
С помощью бабочек Festo делает еще один шаг в области миниатюризации, облегченной конструкции и функциональной интеграции. ЕMotionButterflies впечатляют своим интеллектом, механической системой и минимально возможными силовыми агрегатами в ограниченном пространстве. Уменьшенное количество материалов позволяет создать настоящую атмосферу для проведения естественных полетов.
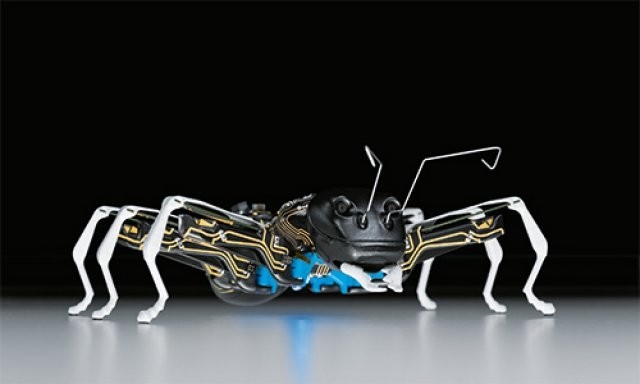
Для BionicANTs Festo не только взял за основу анатомию естественного муравья как образец для подражания. Впервые, кооперативное поведение этих насекомых также было передано в мире технологий с помощью сложных алгоритмов управления.
Интегрированные системы для решения общей задачи
Как и естественные образцы для подражания, муравьи-роботы BionicANT работают вместе в соответствии с четкими правилами. Они общаются друг с другом и координируют свои действия и движения друг с другом. Искусственные муравьи, таким образом, демонстрируют, как автономные отдельные компоненты могут решить сложную задачу совместно в качестве общей сетевой системы.
Последние методы производства и технологии
Не только кооперативное поведение искусственных муравьев является удивительным. Даже их способ производства является уникальным. Компоненты роботов агломерированы лазером и оснащены видимыми проводящими структурами в процессе 3D MID. Таким образом, они берут на себя проектирование и электрические функции одновременно.
По информации robotics.ua, в технологии привода, используемого в ногах, Festo использует преимущества технологии пьезо – гибочные приводы, которыми можно управлять быстро и точно, и которые работают с небольшими затратами энергии и не требуют много места.