
Когда хирурги пытаются добраться до органов тела человека, располагающихся в труднодоступных местах, они вынуждены делать многочисленные дополнительные разрезы и использовать специальные инструменты, называемые ретракторами, для того, чтобы получить доступ к необходимой области под различными углами. Однако, группа исследователей из Италии, работающая в рамках общеевропейского проекта STIFF-FLOP, разработала альтернативный вариант – гибкий инструмент, в основе которого лежит строение щупалец осьминога. Обладая высокой гибкостью, подвижностью и возможностью фиксации, этот инструмент может проникнуть в область проведения операции, деликатно приподнять органы и удерживать их в определенном положении, освобождая хирурга для выполнения других сложнейших манипуляций.
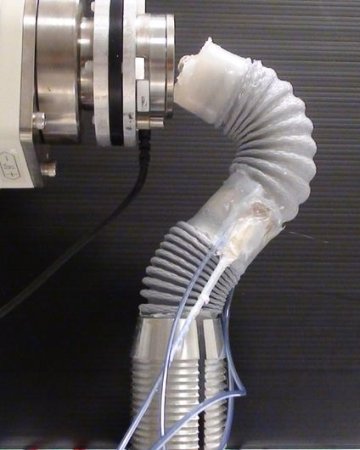
Опытный образец инструмента состоит из двух модулей, в каждом из которых содержится по три отдельные цилиндрические воздушные камеры. Выборочно и синхронно изменяя уровень давления в каждой из камер, можно заставить этот гибкий манипулятор изгибаться, растягиваться вдоль его длины и вытягиваться в определенном направлении. Но, для того, чтобы манипулятор мог фиксировать и удерживать органы, он должен обладать достаточной силой и механической прочностью, по крайней мере, на какое-то время. Это решено за счет использования мелкого гранулированного материала, наподобие молотого кофе, который содержится в специальных межмембранных отсеках манипулятора.
В обычном состоянии этот гранулированный материал мягок и податлив, он совершенно не мешает движениям манипулятора. Но, как только из камер откачивается воздух, создавая тем самым вакуум достаточной глубины, плотность гранулированного материала резко увеличивается и он становится твердым, как вышеупомянутый молотый кофе в вакуумной упаковке.
Благодаря наличию технологии вакуумного уплотнения, манипулятор, оставаясь мягким и гибким, добирается к необходимому месту, раздвигая ткани и органы, не повреждая их при этом. Достигнув нужного места, манипулятор раздвигает окружающие ткани, освобождая свободное рабочее пространство и укрепляет себя, обеспечивая полную неподвижность. Таким образом, хирург, используя камеру и инструменты, закрепленные на конце манипулятора, получает возможность выполнения действий, освобождаясь от необходимости проникать руками вглубь тела пациента.
Опытный образец манипулятора способен изгибать свое “тело” на угол до 255 градусов, растягиваться на 62 процента от своей изначальной длины и увеличивать свою прочность на 200 процентов. Во время проведения испытаний манипулятор продемонстрировал свою способность касаться, отодвигать и перемещать, не повредив их, тонкие воздушные шарики с налитой в них водой, которые служили имитаторами хрупких внутренних органов организма человека.
“В традиционной хирургии достаточно часто требуется использование массы различных инструментов и устройств для выполнения одного простейшего действия” – рассказывает доктор Томмазо Ранцани (Dr. Tommaso Ranzani), ведущий ученый данного проекта, – “Мы полагаем, что разработанный нами манипулятор является первым шагом к созданию универсального хирургического инструмента, который способен к выполнению сложнейших действий в самых труднодоступных местах организма человека”.
