Умение скатов “летать” в воде может помочь разработчикам из Университета в Буффало в Нью-Йорке спроектировать целый класс биологических роботов.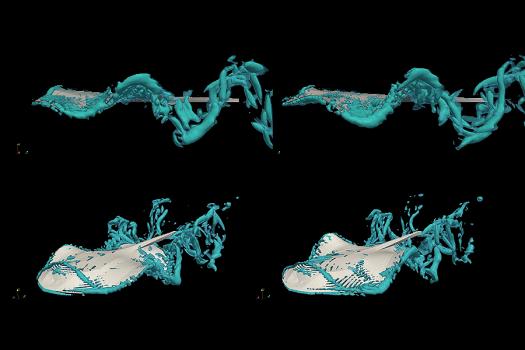
Благодаря “волнистому скольжению” ската можно создать более эффективных и гибких подводных роботов .
Для того, чтобы посмотреть, почему эти плоские рыбы двигаются так странно – как “флаг, который развивается на ветру”, исследователи нанесли на карту завихрения, которые появляются вокруг ската, когда он плывет. Они исследовали завихрения спереди и завихрения во время движения объекта. Именно такие же завихрения помогают птицам и насекомым летать по воздуху.
Модель показала, что скаты передвигаются по воде с помощью вихрей (синие пузыри в приведенной выше модели), которые создают поле низкого давления в передней части и высокого давления вблизи его задней части. Это перемещает рыбу вперед без необходимости тратить много энергии.
Разработчики из Баффало представили свои модели на ежегодном заседании по гидродинамике Американского физического общества в конце этого месяца. Они пока не говорят, как именно они могли бы использовать “скатоподобную подлодку”, но планируют проводить больше исследований по моделированию различных типов движения.