Способность ориентироваться в условиях узкого пространства и меняющихся условиях окружающей среды и не подвергать людей риску делает ликвидацию последствий стихийных бедствий важной функцией роботов. Это одно из наиболее перспективных приложений для роботизированных механизмов. Исследователи из университета Мексики Гвадалахары (UDG) разработали алгоритм, который может пригодиться в подобных ситуациях. С его помощью роботы смогут различать людей от просто груды мусора.
Команда ученых использовала робота подобного модели 110 FirstLook robot от компании iRobot. Робот способен прочертить себе траекторию следования или создать 2D карту, поскольку обладает датчиками движения, камерами, лазером и инфракрасной системой. Благодаря стереоскопической камере высокого разрешения и встроенному фонарику механизм получает изображения окружающей его среды и таким образом может распознать находятся ли там люди.
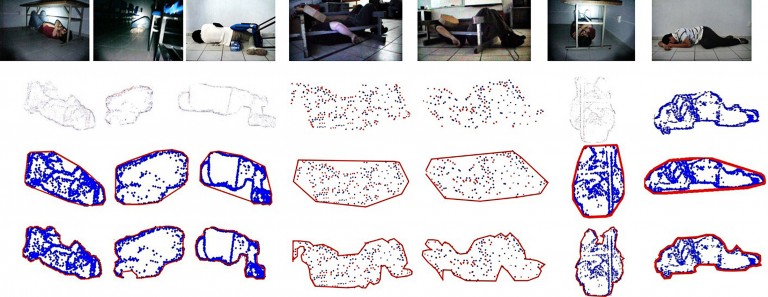
Робот выполняет это с помощью камеры для сканирования местности, и может различать, где находятся булыжники и строительная каменная кладка. Специальная идентификационная система распознает полученные снимки – форму, цвет и плотность заснятых предметов, находящихся вокруг.
Все отдельные сегменты затем объединяются для создания новой картинки, которая в свою очередь проходит через фильтр. Таким образом, можно определить является ли это человеческим силуэтом. Вся система может быть полностью интегрирована в робота, или алгоритм может работать на отдельном ноутбуке и контролировать робота по беспроводной сети.